ADsP
ADsP 3과목 4-4 시계열 분석 | 정리📝
studyrooom
2024. 9. 20. 17:42
SMALL
시계열 분석
시계열이 정상인지 판단하기 위해 폭발적인 추세를 보이거나 시간에 따라 분산이 변화하는지 관찰해야 함
외부인자와 관련해 계절적인 패턴, 추세와 같은 요소를 설명할 수 있는 모델을 결정하는 것
- 시계열 데이터: 시간의 흐름에 따라 관찰한 관측값
- 시계열 데이터의 모델링은 다른 분석모형과 같이 탐색 목적과 예측 목적으로 나눌 수 있음
- 정상성(Stationarity): 시간의 흐름에 따라 통계적 특성(분산, 평균)이 변하지 않는 성질
- 약정상성(시차에만 의존하는 공분산)
: 모든 시점에 기댓값과 분산이 일정하고 자기 공분산은 시차에만 의존 - 정상 시계열은 어떤 일정한 값을 중심으로 일정한 변동 폭을 가짐
- 안정적 시계열: 시간의 추이와 관계 없이 평균, 분산이 불변하여, 변했다고 해도 다시 평균으로 회귀하는 경향을 보임
- 약정상성(시차에만 의존하는 공분산)
- 비정상성 시계열은 통계 분석이 어려워 정상 시계열로 변환해 줘야함 (대부분 비정상 시계열)
- 차분(differencing): 시점 간 변화량 (평균이 일정하지 않을 때)
- 변환: 로그 변환, Box-cox 변환 등 (분산이 일정하지 않을 때)
시계열 데이터 분석 프로세스
- 시간 그래프 그리기
- 추세와 계절성 제거
- 잔차 예측
- 잔차에 대한 모델 적합하기
- 예측된 잔차에 추세와 계절성을 더해 미래 예측
시계열 분석 기법
- 이동평균법: 계절, 불규칙 변동을 제거하고, 추세와 순환변동만 가진 시계열 자료로 변환하는 평활법
- 지수평활법: 시간의 흐름에 따라 최근 시계열에 더 많은 가중치를 부여하여 미래를 예측하는 방법
- 단순지수평활법: 추세나 계절성이 없어 평균이 변화하는 시계열에 사용하는 방법
- 이중지수평활법: 평균을 평활하는 모수와 함께 추세를 나타내는 식을 다른 모수로 평활하는 방법
시계열 분해: 시계열을 몇 가지 요인으로 분해하여 분석하는 방법론
- 추세(Trend): 시간(장기)에 따른 값의 증가/감소
확률과정의 기댓값으로 선형적 형태, 지수적 형태 등이 있음 - 계절성(Seasonality): 일정 빈도로 반복되는 패턴(단기간 동안 주기적)
- 주기(Cycle, 순환): 일정하지 않은 빈도로 반복되는 패턴
경제적 · 자연적 이유 없이 알려지지 않은 주기를 갖고 변하는 자료 - 잔차(Residual, 불규칙): 추세/계절성/주기 등의 요인을 제거하고 남은 요인
Y = T + S + C + I : 시계열을 덧셈이나 곱셈으로 분해하기도 함
시계열 모형
- 백색잡음(White Noise): 서로 독립이고 동일한 분포를 따르는 확률변수들의 계열로 구성된 확률과성으로서 평균이 0을 따름
평균 0 : 백색잡음에 대한 합이 0에 수렴함
잡음은 무작위적인 변동으로 원인이 알려져 있지 않음 - 이동평균(Moving Average)
$Y_t=ε_t+ θ_1ε_{t−1}+θ_2ε_{t−2}+⋯+θ_qε_{t−q}$
- 시점이 다른 백색잡음의 비선형 결합으로 이루어짐
- 시계열 데이터의 비선형 결합
- 항상 정상성을 만족하고, 일정한 주기와 패턴을 가짐
- ACF의 절단점을 통해 모형의 차수($q$)를 판단
- 자기회귀(Auto-Regressive): 이전 시점의 자료값에 의한 선형결합
$Y_t=ϕ_1Y_{t−1}+ϕ_2Y_{t−2}+⋯+ϕ_pY_{t−p}+ε_t$
- 현재($t$) 시점의 데이터가 $p$ 시점 이전 ($t-p$)의 데이터로부터 영향을 받는 모형
- $ϕ$ : 일종의 회귀계수
- $ε_t$ : 백색잡음 과정(White Noise) 평균 0, 일정한 분산, 시간의 흐름에 따른 상관성 없음
- PACF의 절단점의 시점을 통해 AR 모형의 차수($p$)를 판단
- 자기회귀 이동평균(Auto-Regressive Moving Average)
- 자기회귀 누적 이동평균(Auto-Regressive Integrated Moving Average) (ARIMA 모형)
: $d$번 차분한 시계열이 정상성을 띠고 ARMA($p, q$) 모형을 따를 때, 원 시계열을 **ARIMA($p, d, q$)**로 표현
ex) ARIMA(1, 1, 1)을 따르는 시계열 Y는 d=1번 차분 후 ARMA(1, 1)을 따르는 정상 시계열이 됨
- 가장 일반적인 모형 (비정상성 시계열 모형)
- p = 0 : IMA($d, q$) —차분→ MA($q$)
- d = 0 : ARMA($p, q$)
- q = 0 : ARI($p, d$)
- 자기회귀 = AR(p)
- ACF : 지수적 감소
- PACF : $p+1$ 시점부터 절단 (0으로 수렴)
- 이동평균 = MA(q)
- ACF : $q+1$ 시점부터 절단 (0으로 수렴)
- PACF : 지수적 감소
ACF와 PACF
자기 상관성(Auto-Correlation): 확률변수 $X$의 서로 다른 두 시점의 관측치 사이에 존재하는 상관성
- ACF(자기 상관함수): 자기 상관성을 나타내는 상관계수
시간의 흐름에 따른 변수 간의 상관관계 변화- 이동평균(MA) 차수(order) 판단에 쓰임
- PACF(편자기상관함수): 특정 시차가 아닌 다른 변수의 영향을 제거한 시차에 따른 상관계수
(부분 자기 상관계수)
두 시계열 확률변수 간에 다른 시점의 확률변수 영향력은 통제하고 상관관계만 보여줌- 자기회귀(AR) 차수(order) 판단에 쓰임
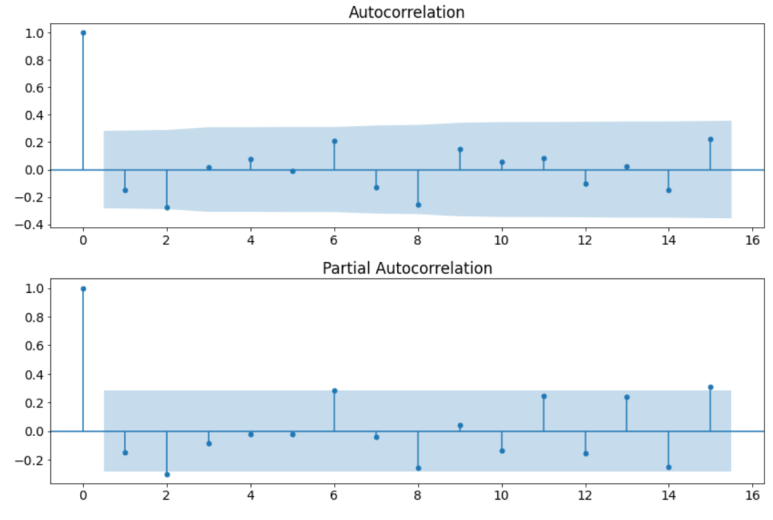
ACF: 시차 안으로 들어가기 전까지 / PACF: 시차 밖으로 튀어나온 거
- 자기회귀(AR) 차수(order) 판단에 쓰임
반응형
LIST